您现在的位置:首页 >> 技术文章
您现在的位置:首页 >> 技术文章

旋转机械的相对判定基准步骤

-上海莱购真空流体设备科技有限公司 http://www.86ehs.com 发布时间:2014-11-05
当绝对判定基准不适用时,可用下述方法求得判定基准值来判断设备有无异常。
1)相对判定基准值确定程序如下:
• 先确认对象设备是在正常状态
• 然后确定检测点
• 在同一测点上测25次以上(每次重新接触测定)
• 每个测点,从测定值计算平均值(Mg)和标准差(σ)
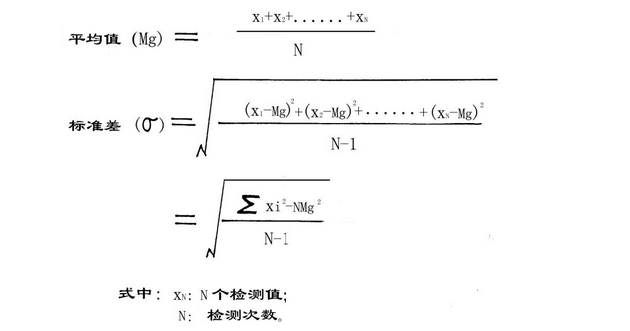
• 用下式,可求得达到注意状态的平均值(MC)以及达到危险状态的平均值(Md)。
注意域的平均值(Mc)=Mg+2σ
危险域的平均值 (Md) =Mg+3σ
但是,也有可能刚超过MC时,就到了危险状态,这样正常和危险就不明确了。所以划出一个注意区域:检测值在Mc 以下时判为正常;在Mc 和Md 之间即为正常和危险不能确定的状态(不明状态或注意区域)。
2)利用上述基准进行设备诊断时,应注意以下几点:
• 在同一测点测三次,将三次平均值作为检测值和相对判定基准比较、判定。
• 检测时在同一位置,按压力大小和方向都不变。
• 求Mc和Md时,假定不明状态和危险状态时检测值分布的标准差同正常状态时是同样的(σ相同)
• 用Mc作注意状态基准,Md作为危险状态基准时:

a. 尽管设备处于正常状态,但判定为不明状态的概率仍有2.3%,判定为危险状态的概率仍有0.1%
b. 当对象设备处于不明状态时,(检测值等于Mc时)判定正常或不明状态的概率各为50%,判定为危险状态的概率为15.9%
c. 当检测值等于Md时,对象设备达到危险状态,这时,判定为正常状态的概率仍有15.9%。
为减少判断误差,应遵守各项注意事项进行检测,这些注意事项对任何一种检测值的分散性都减小的(用标准差的平方表示检测值的分散程度)。特别是取三次读数的平均值作为检测值时,分散性就减小到1/3,误判概率就能降低。
• 从正常状态的振动测定结果求得的Mc和Md这些标准,还有待于根据设备特征,过去的维修数据,今后的维修数据,实施维修的状况,再求得最佳的绝对判定基准。(通过过去与现在的实际情况而定出)
上一篇:高压风机分解图及各配件详解
下一篇:高压鼓风机选型与维护保养
合作&伙伴BRAND PARTNERS